定义
进程间通信必须通过内核。
Linux进程间通信机制分三类:数据交互,同步,信号。理解了这些机制才能灵活运用操作系统提供的IPC工具。
- 管道(包括有名管道和无名管道)
- 信号
System V IPC(消息队列,共享内存,信号量)Socket(UNIX域套接字和网络套接字)
多进程内存共享问题
竞争条件(
Race Condition)、数据同步、死锁(Deadlock)
- 竞争条件(Race Condition):当多个进程同时访问和修改共享内存时,由于执行顺序的不确定性,可能导致数据不一致或不正确的结果。
- 数据同步问题:不同的进程可能以不同的速度访问共享内存,导致数据在读取和更新之间的时间差异,进而引发数据不一致的问题。
- 死锁(Deadlock):如果多个进程在访问共享内存时发生互相等待的情况,可能导致死锁,使得进程无法继续执行。
解决措施
互斥锁、信号量、条件变量、进程间通信(
IPC)
- 互斥锁(Mutex):通过在访问共享内存之前获取互斥锁,并在访问完成后释放锁,可以确保同一时间只有一个进程访问共享内存,从而避免竞争条件。
- 信号量(Semaphore):通过使用信号量来同步进程的访问,可以控制同时访问共享内存的进程数量,从而避免数据同步问题和死锁。
- 条件变量(Condition Variable):条件变量可以用于进程间的通信和同步,它可以在特定条件满足时唤醒等待的进程,从而避免忙等待和减少资源消耗。
- 进程间通信机制(IPC):使用操作系统提供的进程间通信机制,如管道、消息队列、共享内存、套接字等,可以实现进程间的数据传输和同步,确保共享数据的正确性和一致性。
多进程、多线程同步(通讯)方法⭐⭐⭐⭐
| 同步/通信方式 | 进程通信 | 进程同步 | 描述 |
|---|---|---|---|
互斥锁(Mutex) | ⭐️ | 保护共享资源的互斥访问。 | |
信号量(Semaphore) | ⭐️ | ⭐️ | 控制临界资源的访问数量。 |
条件变量(Condition Variable) | ⭐️ | 进程等待和唤醒。 | |
| 屏障(Barrier) | ⭐️ | ⭐️ | 同步多个进程或线程的执行。 |
读写锁(Read-Write Lock) | ⭐️ | 允许多读单写的访问模式。 | |
事件(Event) | ⭐️ | ⭐️ | 进程间的通知和同步。 |
| 管程 | ⭐️ | 组合互斥锁、条件变量和共享数据结构,确保线程的互斥和同步。 | |
管道(Pipe) | ⭐️ | 适用于有亲缘关系的进程,单向通信。 | |
命名管道(Named Pipe) | ⭐️ | 适用于没有亲缘关系的进程,通过特殊文件实现通信。 | |
| 共享内存(Shared Memory) | ⭐️ | ⭐️ | 多个进程访问同一块物理内存实现数据共享。 |
| 消息队列(Message Queue) | ⭐️ | 通过消息队列发送和接收消息,实现异步通信。 | |
| 套接字(Socket) | ⭐️ | 通用的进程间通信机制,可在不同主机间通信。 | |
| 文件 | ⭐️ | 通过文件操作实现进程间通信和数据交换。 |
管道 ⭐⭐⭐
管道是一种用于两个进程间同一时刻进行单向通信的机制,也被称为半双工管道。
管道传输的数据是无格式的流且大小受限。
pipe_buf:内核定义管道的最大容量,通常为4KB~64KB。
管道优势
管道(
pipe)在Unix和类Unix操作系统中是一种基本的进程间通信(IPC)机制
- 简单:无需特殊权限,通过标准系统调用创建。
- 高效:不需要额外的系统调用或上下文切换,提高数据传输效率。
- 同步:写操作会阻塞直到读操作准备好读取数据,可以避免数据丢失。
- 流式:可以处理任意长度的数据流,不需要预先定义数据大小。
实现原理
操作系统在内核中开辟一块缓冲区(管道),用于进程之间的通信。由于其特性,同一时刻只能有一个进程进行读或写操作,所以称为半双工。
管道破裂
一个进程向另一个已经被关闭的管道写数据时产生的错误,通常发生在写端没有检查读端是否有效。
解决方式:
- 忽略SIGPIPE信号:设置信号处理函数来忽略
SIGPIPE信号,这样即使管道破裂,进程也不会被终止。 - 使用getsockopt()检查连接状态:调用
getsockopt()函数可以主动检测套接字的状态,如果检测到与服务器的连接已经断开,可以采取相应的措施,如重新连接或存储数据以便稍后发送。 - 优化代码逻辑:在写数据之前检查管道的读端是否关闭,如果关闭则避免写入数据,或者使用非阻塞的管道操作来避免进程被阻塞。
- 增加管道缓冲区大小:通过
ulimit命令查看和修改管道缓冲区的大小,以避免因缓冲区满而导致的管道破裂错误。
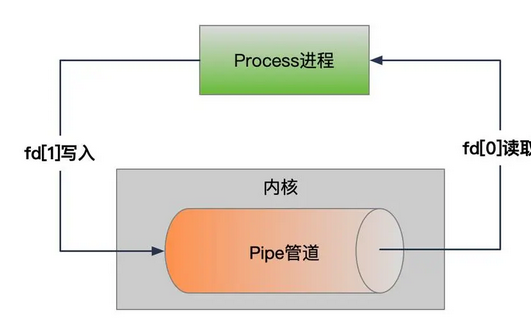
无名管道
无名管道的读端由描述符
fd[0]表示,写端由描述符fd[1]表示。
- 只能用于有关联的进程间数据交互,如父子进程,兄弟进程,子孙进程,在目录中看不到文件节点,读写文件描述符存在一个
int型数组中。 - 只能单向传输数据,即管道创建好后,一个进程只能进行读操作,另一个进程只能进行写操作,读出来字节顺序和写入的顺序一样。
使用步骤
- 调用
pipe()函数创建管道,获取管道的读端和写端的文件描述符。 - 调用
fork()创建子进程,此时子进程会继承父进程的管道描述符。 - 在父进程中关闭管道的不需要的端口,例如关闭管道的读端,保留管道的写端;
- 在子进程中关闭管道的另一个端口,即关闭管道的写端,保留管道的读端。
- 父进程通过保留的管道写端,使用
write()函数向管道写入数据。 - 子进程通过保留的管道读端,使用
read()函数从管道中读取数据。 - 父进程和子进程根据需求进行数据的交换和通信。
- 当通信结束后,父进程和子进程分别关闭其管道端口,即父进程关闭管道的写端,子进程关闭管道的读端。
- 父进程通过调用
wait()等待子进程的结束,确保子进程正确退出。
#include <iostream>
#include <unistd.h>
#include <sys/wait.h>
#include <cstring>
int main() {
int pipefd[2]; // 用于存储管道读端和写端的文件描述符
// 创建管道
if (pipe(pipefd) == -1) {
perror("pipe");
exit(EXIT_FAILURE);
}
pid_t pid = fork();
if (pid == -1) {
perror("fork");
exit(EXIT_FAILURE);
}
else if (pid == 0) {
// 子进程读取管道中的数据
close(pipefd[1]); // 关闭管道写端
char buffer[100];
ssize_t bytesRead = read(pipefd[0], buffer, sizeof(buffer));
if (bytesRead == -1) {
perror("read");
exit(EXIT_FAILURE);
}
else if (bytesRead == 0) {
std::cout << "管道已关闭" << std::endl;
}
else {
std::cout << "子进程读取到的数据:" << buffer << std::endl;
}
close(pipefd[0]); // 关闭管道读端
exit(EXIT_SUCCESS);
}
else {
// 父进程向管道写入数据
close(pipefd[0]); // 关闭管道读端
const char message[] = "Hello, World!";
ssize_t bytesWritten = write(pipefd[1], message, strlen(message));
if (bytesWritten == -1) {
perror("write");
exit(EXIT_FAILURE);
}
close(pipefd[1]); // 关闭管道写端
wait(NULL); // 等待子进程退出
exit(EXIT_SUCCESS);
}
}有名管道
命名管道允许无亲缘关系的进程间通信,通过文件系统中的特殊文件进行。
- 可以使无关联的进程通过
fifo文件描述符进行数据传递; - 单向传输有一个写入端和一个读出端,操作方式和无名管道相同。
使用步骤
- 使用
mkfifo()创建fifo文件描述符。 - 打开管道文件描述符。
- 通过读写文件描述符进行单向数据传输。
mkfifo fifo
ls
ls -al信号 ⭐⭐⭐
常见信号及含义
| 信号 | 含义 |
|---|---|
SIGHUP | 终端挂起信号 |
SIGINT | 中止前台进程 |
SIGFPE | 致命算术运算错误 |
SIGKILL | 立即结束程序 |
SIGALRM | 时钟定时信号 |
SIGTERM | 正常结束进程 |
SIGCHLD | 子进程结束信号 |
SIGCONT | 让暂停进程恢复执行 |
SIGSTOP | 暂停前台进程 |
信号发送
信号是
Linux系统响应某些条件而产生的一个事件,接收到该信号的进程会执行相应的操作。
信号产生的三种方式
- 由硬件产生,如从键盘输入
Ctrl+C可以终止当前进程 - 由其他进程发送,如可在shell进程下,使用命令 kill -信号标号 PID,向指定进程发送信号。
- 异常,进程异常时会发送信号
信号接收
信号处理程序
一个用于处理接收到的信号的特殊函数。当进程接收到一个信号时,操作系统会将控制权转移到相应的信号处理程序,该程序执行与信号相关的操作。信号处理程序可以执行各种操作,如捕获和处理异常、记录日志、执行特定的操作等。
信号的作用
- 异常处理:当进程遇到错误或异常情况时,操作系统可以向进程发送相应的信号,使得进程能够捕获并处理这些异常,保证程序的稳定性和可靠性。
- 事件通知:操作系统可以向进程发送信号,通知其发生了某个特定的事件,如键盘输入、鼠标点击等。进程可以捕获这些信号并作出相应的响应。
- 进程间通信:进程可以使用信号进行通信。一个进程可以向另一个进程发送信号,请求某种操作或提醒对方发生了某个事件。
System V IPC
System V Interprocess Communication
共享内存
共享内存允许多个进程直接访问同一块内存区域,就是拿出一块虚拟地址空间来,映射到相同的物理内存中,进程间的数据传输不再涉及内核。
- 无需数据复制。
- 需要开辟一块物理内存,映射到不同进程的内存空间。
- 需要借助同步机制避免数据竞争。
- 生命周期跟随内核。
共享内存如何实现数据同步
借助同步机制避免数据竞争。
消息队列
消息队列是保存在内核中的消息链表
- 消息队列生命周期随内核
- 消息队列不适合比较大数据的传输
- 消息队列通信过程中,存在用户态与内核态之间的数据拷贝开销
信号量
信号量其实是一个整型的计数器,主要用于实现进程间的互斥与同步,而不是用于缓存进程间通信的数据。
- 信号量的主要作用是保护临界资源,使得在一个时刻只有一定数量的进程或线程可以访问。
- 如果其他进程已经对其进行上锁,那么当前进程会进入睡眠状态,等待其他人对信号量进行解锁。
原理
基于
P(sv)和V(sv)两种原子操作,P操作减一,V操作加一
P操作是用在进入共享资源之前,V操作是用在离开共享资源之后,这两个操作是必须成对出现的。- 信号初始化为
0,就代表着是同步信号量,它可以保证进程A应在进程B之前执行。 P(sv)操作会将信号量的值减1,如果信号量的值大于零,进程或线程可以继续访问共享资源;如果信号量的值为零,进程或线程会被挂起,直到其他进程或线程通过V(sv) 操作释放信号量。V(sv)操作会将信号量的值加1,如果有进程或线程因等待信号量而被挂起,它们中的一个会被唤醒继续执行;如果没有进程或线程等待信号量,信号量的值会增加。
struct semaphore
struct semaphore{
raw_spinlok_t lock;//自旋锁,用于多核CPU同步
unsigned int count;//信号量的计数器,上锁时`count`减一,如果结果`count`大于0,则表示上锁成功。
struct list_head wait_list;//正在等待信号量解锁的进程队列。
};信号量 上锁通过 down() 函数实现
void down(struct semaphore *sem)
{
unsigned long flags;
spin_lock_irqsave(&sem->lock, flags);
if (likely(sem->count > 0)){
sem->count--;
}else{
__down(sem);
}
spin_unlock_irqrestore(&sem->lock, flags);
}down()函数首先对信号量进行自旋锁操作(为了避免多核CPU竞争)。- 然后比较计数器是否大于
0,如果是对计数器进行减一操作,并且返回。 - 否则调用
__down()函数进行下一步操作。
static noinline void __sched __down(struct semaphore *sem)
{
__down_common(sem, TASK_UNINTERRUPTIBLE, MAX_SCHEDULE_TIMEOUT);
}
static inline int __down_common(struct semaphore *sem,long state, long timeout)
{
struct task_struct *task = current;
struct semaphore_waiter waiter;
// 把当前进程添加到等待队列中
list_add_tail(&waiter.list, &sem->wait_list);
waiter.task = task;
waiter.up = 0;
for (;;) {
...
__set_task_state(task, state);
spin_unlock_irq(&sem->lock);
timeout = schedule_timeout(timeout);
spin_lock_irq(&sem->lock);
// 当前进程是否获得信号量锁?
if (waiter.up){
return 0;
}
}
...
}__down() 函数最终调用 __down_common() 函数
__down_common()的操作流程:
- 把当前进程添加到信号量的等待队列中。
- 切换到其他进程运行,直到被其他进程唤醒。
- 如果当前进程获得信号量锁(由解锁进程传递),那么函数返回。
解锁过程主要通过 up() 函数实现
void up(struct semaphore *sem)
{
unsigned long flags;
raw_spin_lock_irqsave(&sem->lock, flags);
if (likely(list_empty(&sem->wait_list))) // 如果没有等待的进程, 直接对计数器加一操作
sem->count++;
else
__up(sem); // 如果有等待进程, 那么调用 __up() 函数进行唤醒
raw_spin_unlock_irqrestore(&sem->lock, flags);
}
static noinline void __sched __up(struct semaphore *sem)
{
// 获取到等待队列的第一个进程
struct semaphore_waiter *waiter = list_first_entry(
&sem->wait_list, struct semaphore_waiter, list);
list_del(&waiter->list); // 把进程从等待队列中删除
waiter->up = 1; // 告诉进程已经获得信号量锁
wake_up_process(waiter->task); // 唤醒进程
}解锁流程:
- 判断当前信号量是否有等待的进程,如果没有等待的进程, 直接对计数器加以操作
- 如果有等待的进程,那么获取到等待队列的第一个进程。
- 把进程从等待队列中删除。
- 告诉进程已经获得信号量锁。
- 唤醒进程。
Socket
跨网络与不同主机上的进程之间通信,就需要
Socket通信。
- 实现
TCP字节流通信:Socket类型是AFINET和SOCKSTREAM; - 实现
UDP协议通信。 - 本地进程间通信。
Socket 通信建立流程
服务端调用
accept时,连接成功了会返回一个已完成连接的socket,后续用来传输数据。
监听的
socket和真正用来传送数据的socket,是「两个」socket,一个叫作监听socket,一个叫作已完成连接socket。
- 服务端和客户端初始化
socket,得到文件描述符; - 服务端调用
bind,将绑定在IP地址和端口; - 服务端调用
listen,进行监听; - 服务端调用
accept,等待客户端连接; - 客户端调用
connect,向服务器端的地址和端口发起连接请求; - 服务端
accept返回用于传输的socket的文件描述符; - 客户端调用
write写入数据; - 服务端调用
read读取数据; - 客户端断开连接时,会调用
close,那么服务端read读取数据的时候,就会读取到了EOF,待处理完数据后,服务端调用close,表示连接关闭。