定义
I2C(Inter-Integrated Circuit)是一种串行通信总线协议,用于在集成电路(IC)之间进行通信。
- 由两根线组成:串行数据线(
SDA)和串行时钟线(SCL)。 I2C总线采用主从结构,可以支持多个设备在同一条总线上进行通信。
常用于读取硬件监视器、传感器、实时时钟、控制执行器、访问低速DAC和ADC、控制简单的LCD或OLED显示器、通过显示数据通道更改计算机显示设置(例如背光、对比度、色调、色彩平衡)以及更改扬声器音量。
总线结构
由
SDA(串行数据线)和SCL(串行时钟线)及上拉电阻组成。
在总线空闲状态时,这两根线一般上拉电阻拉高,保持着高电平。
I2C传输中有几种信号
三种信号:开始信号、应答信号、结束信号
I2C传输一个byte需要几个CLK
- 9个
I2C从机地址
I²C的参考设计使用一个7比特长度的地址空间但保留了16个地址,所以在一组总线最多可和112个节点通信。
从机地址也可选择10比特长度。
两个设备地址冲突
- 单独的I2C总线:需要额外硬件资源。
- 修改设备地址:某些
I²C设备支持通过硬件跳线(ADDR引脚)或命令改变地址。
I2C速率
| Mode | Maximum speed | Maximum capacitance | Drive | Direction |
|---|---|---|---|---|
| Standard mode (Sm) | 100 kbit/s | 400 pF | Open drain* | Bidirectional |
| Fast mode (Fm) | 400 kbit/s | 400 pF | Open drain* | Bidirectional |
| Fast mode plus (Fm+) | 1 Mbit/s | 550 pF | Open drain* | Bidirectional |
| High-speed mode (Hs) | 1.7 Mbit/s | 400 pF | Open drain* | Bidirectional |
| High-speed mode (Hs) | 3.4 Mbit/s | 100 pF | Open drain* | Bidirectional |
| Ultra-fast mode (UFm) | 5 Mbit/s | ? | Push–pull | Unidirectional |
I2C数据位
每次发送8位,一般MSB(最高位)最先通过SDA传输,每发送一个字节,对应设备都需要回复一个ack确定位。
1:当SCL为高电平时,SDA保持为高电平。0:当SCL为高电平时,SDA保持为低电平。
I2C确认位
-
ACK
- 发送方发出地址或数据,接收方拉低 SDA 线确认收到。
- 通信继续进行。
-
NACK
- 从设备无法识别主设备的地址。
- 接收数据缓冲区已满。
- 数据传输完成后,从设备用 NACK 表示不再需要数据。
I2C数据的流程
数据通过单条 SDA 数据线,通过 0 和 1(位)的图案化序列在主设备和从设备之间传输。
每个 0 和 1 的序列称为一个事务,每个事务中的数据结构如下:
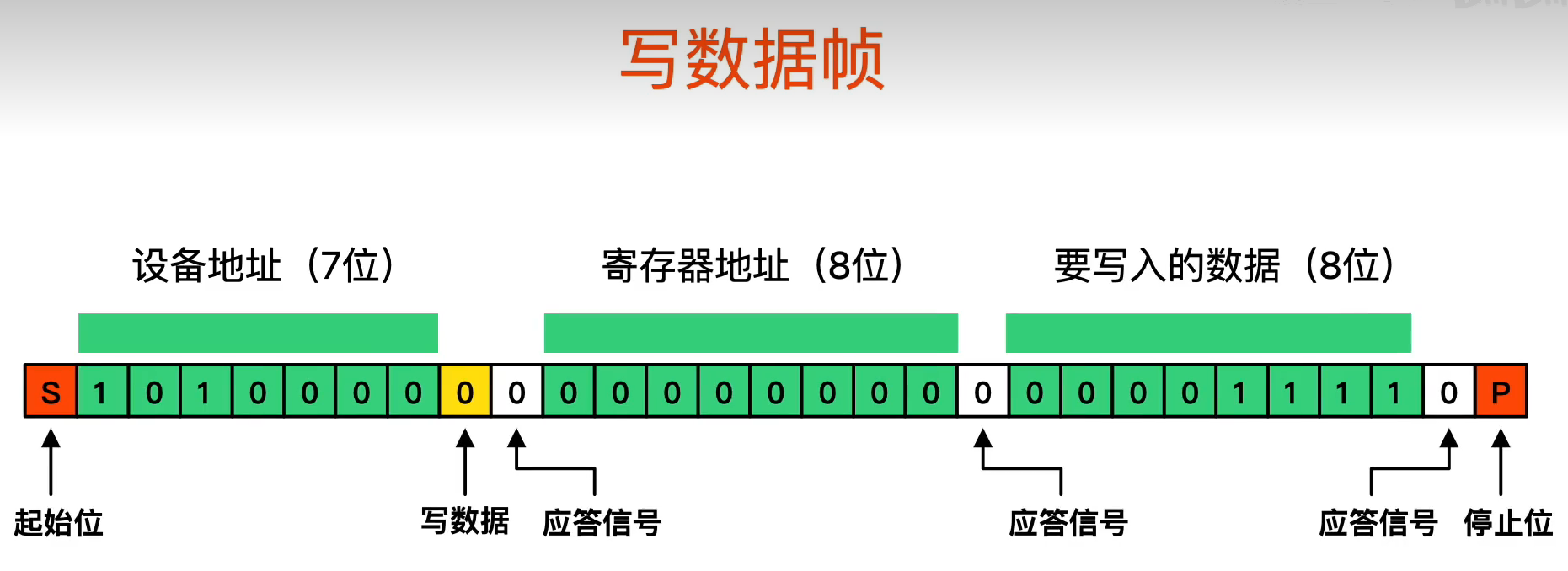
- 开始信号:
SCL为高电平时,SDA由高电平向低电平跳变-->开始传输数据 - 设备地址:
7位从机地址-->选择设备 - 再给地址添加一个方向位用来表示接下来数据传输的方向(
0表述主⇒从wirte)(1表示从⇒主read) - 寄存器地址:等价于数据
- 数据:由
8位组成,它们由发送方设置,以及需要传输到接收方的数据位。后跟一个ACK/NACK位。 - ACK/NACK位:代表已确认/未确认位(应答信号)。如果任何从设备的物理地址与主设备广播的地址一致,则该位的值被从设备设置为“
0”。否则,它保持在逻辑“1”(默认)。 - 结束信号:
SCL为高电平时,SDA由低电平向高电平跳变-->停止传输数据。
时序
写时序
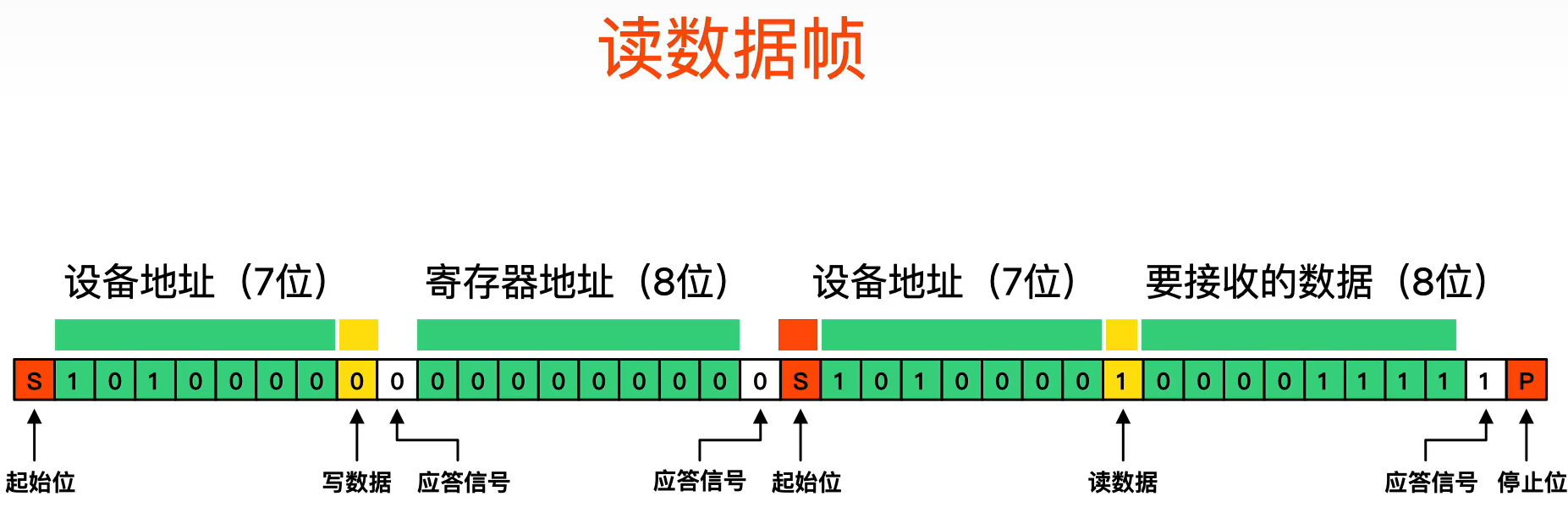
读时序
数据部分从机主动控制总线发送数据给主机,然后主机来进行应答,刚好与IIC写数据相反。
在通信过程中需要进行读写切换时不需要发送停止,而是应答以后重新发一次起始和从机地址及读写状态,接着进行下面的数据处理即可。
硬件电路
开漏输出→多设备共用总线不烧毁电路
- 两条
I2C总线(SDA、SCL)都作为开漏驱动器运行。 I2C网络上的任何设备/IC 都可以将SDA和SCL驱动为低电平,但不能将它们驱动为高电平。- 使用开漏系统的原因是允许多个节点连接到总线,而不会因信号争用而发生短路。
上拉电阻→输出高电平
每条线都需要一个上拉电阻。通过将线拉至地可输出逻辑“0”,通过让线浮动(输出高阻抗)以便上拉电阻将其拉高可输出逻辑“1”。线永远不会主动驱动为高电平。
空闲电平:SCL 和 SDA 均为高电平。
线与
多个节点可能同时驱动线路。如果_任何_节点将线路驱动为低电平,则该节点将为低电平。尝试传输逻辑 1(即让线路浮动为高电平)的节点可以检测到这种情况,并断定另一个节点同时处于活动状态。
SDA-仲裁
在SDA上使用时,线与被称为仲裁,确保每次只有一个发送器。
每个控制器都会监视总线上的起始位和停止位,并且当另一个控制器使总线保持繁忙时,不会启动消息。但是,两个控制器可能会大约同时开始传输;在这种情况下,会发生仲裁。当一个控制器寻址多个目标时,目标传输模式也可以进行仲裁,但这种情况不太常见。I2C具有确定性的仲裁策略。每个发送器都会检查数据线(SDA)的电平并将其与预期电平进行比较;如果它们不匹配,则该发送器已失去仲裁并退出此协议交互。
SCL-时钟延展
已寻址的目标设备在接收(或发送)一个字节后可能会将时钟线 (SCL) 保持在低位,表示它尚未准备好处理更多数据。
与目标通信的控制器可能未完成当前位的传输,而必须等到时钟线实际变为高位。如果目标正在时钟延长,则时钟线仍将处于低位(因为连接是开漏的)。如果第二个较慢的控制器试图同时驱动时钟,情况也是如此。(如果有多个控制器,通常除了其中一个之外,其他所有控制器都会失去仲裁。)
控制器必须等到观察到时钟线升高,并等待最短时间(标准 100 kbit/s I2C为 4 μs)后才能再次将时钟拉低。
I2C模拟
用iic的场景,一般是低速通信,不超过400k,和外设通信,数据量不超过几十个字节,通过SCL时钟驱动,ack握手有有等待时间,还没碰到过时序问题,最多时钟周期不是稳定值,已经好几年多个项目验证了,还没出过问题,适配过至少5种外设,通信频率全部是400K以下的,从来不关中断。
部分产品也是全年无休运行,还没出过问题。在单片机,软核对硬核fpga上跑,都没出过问题。
模拟iic还有一个好处是可以灵活的处理ack超时,提前发停止条件终止通信。
// Hardware-specific support functions that MUST be customized:
#define I2CSPEED 100
void I2C_delay(void);
bool read_SCL(void); // Return current level of SCL line, 0 or 1
bool read_SDA(void); // Return current level of SDA line, 0 or 1
void set_SCL(void); // Do not drive SCL (set pin high-impedance)
void clear_SCL(void); // Actively drive SCL signal low
void set_SDA(void); // Do not drive SDA (set pin high-impedance)
void clear_SDA(void); // Actively drive SDA signal low
void arbitration_lost(void);
bool started = false; // global data
void i2c_start_cond(void)
{
if (started) {
// if started, do a restart condition
// set SDA to 1
set_SDA();
I2C_delay();
set_SCL();
while (read_SCL() == 0) { // Clock stretching
// You should add timeout to this loop
}
// Repeated start setup time, minimum 4.7us
I2C_delay();
}
if (read_SDA() == 0) {
arbitration_lost();
}
// SCL is high, set SDA from 1 to 0.
clear_SDA();
I2C_delay();
clear_SCL();
started = true;
}
void i2c_stop_cond(void)
{
// set SDA to 0
clear_SDA();
I2C_delay();
set_SCL();
// Clock stretching
while (read_SCL() == 0) {
// add timeout to this loop.
}
// Stop bit setup time, minimum 4us
I2C_delay();
// SCL is high, set SDA from 0 to 1
set_SDA();
I2C_delay();
if (read_SDA() == 0) {
arbitration_lost();
}
started = false;
}
// Write a bit to I2C bus
void i2c_write_bit(bool bit)
{
if (bit) {
set_SDA();
} else {
clear_SDA();
}
// SDA change propagation delay
I2C_delay();
// Set SCL high to indicate a new valid SDA value is available
set_SCL();
// Wait for SDA value to be read by target, minimum of 4us for standard mode
I2C_delay();
while (read_SCL() == 0) { // Clock stretching
// You should add timeout to this loop
}
// SCL is high, now data is valid
// If SDA is high, check that nobody else is driving SDA
if (bit && (read_SDA() == 0)) {
arbitration_lost();
}
// Clear the SCL to low in preparation for next change
clear_SCL();
}
// Read a bit from I2C bus
bool i2c_read_bit(void)
{
bool bit;
// Let the target drive data
set_SDA();
// Wait for SDA value to be written by target, minimum of 4us for standard mode
I2C_delay();
// Set SCL high to indicate a new valid SDA value is available
set_SCL();
while (read_SCL() == 0) { // Clock stretching
// You should add timeout to this loop
}
// Wait for SDA value to be written by target, minimum of 4us for standard mode
I2C_delay();
// SCL is high, read out bit
bit = read_SDA();
// Set SCL low in preparation for next operation
clear_SCL();
return bit;
}
// Write a byte to I2C bus. Return 0 if ack by the target.
bool i2c_write_byte(bool send_start,
bool send_stop,
unsigned char byte)
{
unsigned bit;
bool nack;
if (send_start) {
i2c_start_cond();
}
for (bit = 0; bit < 8; ++bit) {
i2c_write_bit((byte & 0x80) != 0);
byte <<= 1;
}
nack = i2c_read_bit();
if (send_stop) {
i2c_stop_cond();
}
return nack;
}
// Read a byte from I2C bus
unsigned char i2c_read_byte(bool nack, bool send_stop)
{
unsigned char byte = 0;
unsigned char bit;
for (bit = 0; bit < 8; ++bit) {
byte = (byte << 1) | i2c_read_bit();
}
i2c_write_bit(nack);
if (send_stop) {
i2c_stop_cond();
}
return byte;
}
void I2C_delay(void)
{
volatile int v;
int i;
for (i = 0; i < I2CSPEED / 2; ++i) {
v;
}
}